|
Programm
zur grafischen Darstellung von Relationen, zur Differentiation und Integration von Funktionen und zur Simulation von Bewegungen
|
Festlegung des
Koordinatensystems (frei wählbar)
Werte, die einem
Achsenabschnitt zugeordnet werden:
|
Bestimmung der Variablen a, b, c, d, f, g, h, i, j, k, l, m, n, o ,p, q ,r, s, t, u, v, w, x, y, z
Empfehlung für die Zuordnung der Bewegungsgrößen zu den gegebenen Variablen:
ax = a, ay = b, vx = c, v y = d, Fx = f, Fy = g, Δt = h, Δx = i, Δy = j, Zeit t = t,
Masse m = m.
Die Wertepaare (u;v), (x;w), (x;y) und (x;z) werden durch Punkte dargestellt, die miteinander verbunden werden.
Hier werden die Programme eingegeben
ACHTUNG: Mit der Eingabe von nur z.B. y=sin(x) geschieht nichts, es gehört dazu ein x=x+h z.B. x=x+0,01 !
Mit y=sin(x); x=x+0,01 wird der Graph der Sinusfunktion gezeichnet. Hierbei wird x schrittweise um 0,01 vergrößert.
Der Anfangswert von x wird im Variablenfeld bei x = eingetragen.
Ausführliche Informationen finden Sie unter den Eingabefenstern!
Folgende Rechenzeichen sind zu verwenden: ^, /, *,-,+. Mit „^“ wird die Hochzahl einer Potenz angezeigt. Die Reihenfolge der verwendeten Rechenzeichen ist wie die Reihenfolge der zugehörigen Rechnungen. sin(),cos(), sing(), cosg(), tan(), tang(), asin(), acos(), asing(), acosg(), atan(), atang() ,exp()(e-Funktion), sinh(), cosh(), lg(), ln(), wrz()(Wurzel), abs()(Betrag) und int()(Wert vor dem Komma) werden vom Rechner als Funktionsterme erkannt.
Die Terme mit der Endung g beziehen sich auf Winkel in Grad, die Terme ohne g beziehen sich auf Winkel im Bogenmass, lg() steht für
einen Logarithmus mit der Basis 10 und ln() für einen Logarithmus zur Basis e. Der Rechner erkennt
pi als die Zahl 3,14......... und e als 2,768...wrz() wird als Wurzelzeichen erfasst (Beispiel wrz(4) =2). Mit abs() wird ein Betrag gebildet. Der Rechner erkennt außerdem ein
Ausrufezeichen als Fakultätszeichen. Zu 5! gibt er 120 an.
Rechenprogramm, welches nicht Graphen, sondern Zahlen liefert (anklicken).
Strecken, Streckenzüge und Diagramme zu Messwerten zeichnen
In das Rechenfenster können kurze Programme zur Simulation von Bewegungen geschrieben werden. Bei einem derartigen Programm handelt es sich um eine Folge von Rechenanweisungen zur Berechnung von Variablen. Die Folge von Anweisungen wird vom Rechner immer wieder mit zuvor geänderten Variablenwerten ausgeführt, bis eine bestimmte Bedingung erfüllt ist.
Beispiele zum Thema Schwingungen:
Ein an einer Spiralfeder schwingender Gegenstand bewege sich mit der Geschwindigkeit 4m/s zum Zeitpunkt t=0 durch den Schwingungsmittelpunkt. Ein Weg-Zeit-Diagramm (y-t-Diagramm) des schwingenden Gegenstands für den Fall k = Federkonstante = 1 kg/s2. kann in folgender Weise realisiert werden: In das obige Fenster werden die Gleichungen k=1;m=1;f = -k*y; a=f/m; h=0,005; x=x+h; l=x; y=0,5*a*h^2+c*h+y; c=c+a*h;t=x; geschrieben (einfügen/kopieren) und in das Variablenfeld werden für c und n die Werte 5 und 18 eingetragen. Nach „Start“ bearbeitet der Rechner immer wieder die eingetragenen Gleichungen in der angegebenen Reihenfolge (maximal 10000 Mal) und erzeugt dabei das gewünschte Diagramm. Im Diagrammfeld werden die Endwerte von x, y, s, r und t links-unten angezeigt. Mit n wird das Ende des Diagramms festgelegt. Das Diagramm (siehe Abb.1) endet dann, wenn l(L) größer als n wird. Geht man davon aus, dass der schwingende Körper eine der Geschwindigkeit proportionale Reibungskraft erfährt, dann muss für die Kraft geschrieben werden: f= -k*y -j*c . Mit j=0,2 wurde das Diagramm in der Abb. 2 erhalten. Die exponentielle Abnahme der Amplitude wird mit dem blauen Diagramm w(x) angezeigt. Mit k=1;m=1;f = -k*y +0,1*sin(x); a=f/m; h=0,005; x=x+h; l=x; y=0,5*a*h^2+c*h+y; c=c+a*h;t=x; wird eine Schwingung simuliert, die von einer Kraft F= 0,1*sin(x) (Resonanzfall) erzwungen wird. Nach den ersten Schwingungen ist ein linearer Anstieg der Amplitude erkennbar (siehe Abb.3). Wie an diesen Beispielen zu sehen ist, kann jede Bewegung eines Massepunktes dargestellt werden, wenn die auf ihn wirkende Kraft als Funktion von Zeit, Ort und Geschwindigkeit bekannt ist. Die Maximalzahl der Messpunkte ist auf 20000 festgelegt.
Anmerkung zu den Gleichungen:
Die Bewegungszeit wird in sehr kleine Zeitabschnitte Δt zerlegt. Ein Δt ist so klein, dass innerhalb dieses Δt die Kraft nach Richtung und Betrag als konstant angesehen werden kann. Mit den für konstante Kräfte geltenden Bewegungsgleichungen wird die Änderung des Orts und der Geschwindigkeit während des ersten Zeitabschnitts Δt berechnet.
a = F
/m ; F : Kraft während des Zeitabschnitts Δt
; a: Beschleunigung vn= a· Δt + vv ; yn = 0,5 ·a · Δt2+ vv ·Δt + yv entspricht: y = 0,5 * a * h^2 + c * h + y; c = c + a * h; Die Größen mit dem Index n sind solche nach Δt,
die mit dem Index v sind solche vor Δt.
Nach dieser Rechnung ist der Ort und die Geschwindigkeit zu Beginn des zweiten Abschnitts Δt bekannt. Mit deren Werten wird daraufhin der Ort und die Geschwindigkeit zu Beginn des dritten Abschnitts ( nach dem Ende des 2. Abschnitts) berechnet usw..
Im Rahmen der Mathematik ist dieses Programm ebenfalls gut einsetzbar. Damit kann beispielsweise integriert und differenziert werden. In Abb.4 ist die Integralfunktion über exp(-x^2) dargestellt. Es wurde mit x=x+0,01; y= 0,01*exp(-x^2)+y;w=exp(-x^2);l=x integriert. Differenziert wird beispielsweise so: h=0,01;x=x+h;y=sin(x);w=(sin(x+h)-sin(x-h))/2/h; u=x; v=(w-q)/h;l=x; q=w (siehe Abb.5). Das blaue Diagramm stellt die erste und das schwarze Diagramm die 2. Ableitung von y= sin(x) dar.
Mit der Zeile x=x+0,01;y=sin(x); w=x; u=y;v=x;l=x wurden die Diagramme in der Abb.6 zum Thema Funktion-Umkehrfunktion erstellt, mit d=d+0,1;x=a*d-b*sin(d); y=a-b*cos(d);l=x wurde die Zykloide (a=1; b=2, d= Winkel im Bogenmaß) in der Abb.7 und mit r=r+1; f=int((r+90)/360)*45; c =a*cosg(r)/(1+sing(r)^2);d = a*cosg(r)*sing(r)/(1+sing(r)^2);x=c*cosg(f)-d*sing(f);y=c*sing(f)+d*cosg(f);l=l+1; die Lemniskaten in der Abb.8 gezeichnet. Mit x=c*cosg(f)-d*sing(f);y=c*sing(f)+d*cosg(f) werden Koordinatentransformationen zu Drehungen mit dem Winkel f vollzogen. Bei der Einstellung "Ohne Gitternetz und Koordinatenachsen" kann eine waagrechte Mittellinie stören, die von den Punkten (w;x) = (0;x) und (z;x) = (0;x) erzeugt wird. Zur Vermeidung dieser Strecke müssen im Variablenfeld für w und z Werte eingetragen werden, mit denen die Punkte (w;x) und (z;x) aus dem Bildfeld herausfallen.
Wichtige Hinweise:
Soll eine Funktion dargestellt werden z.B. y = sin(x), dann muss neben y=sin(x) auch noch eine Gleichung zur schrittweisen Änderung
von x eingetragen werden. Es kann beispielsweise x=x+0,1; sein. Mit Einträgen für x und n im Variablenfeld wird der Definitionsbereich festgelegt. Soll er z.B. mit x = -5 beginnen und mit x = 7 enden, dann wird für x der Wert -5 und für n der Wert 7 eingetragen und die Angaben im Rechenfenster mit l= x ergänzt. Das y(x)- Diagramm wird
nicht fortgesetzt, wenn l = x größer als n ist.
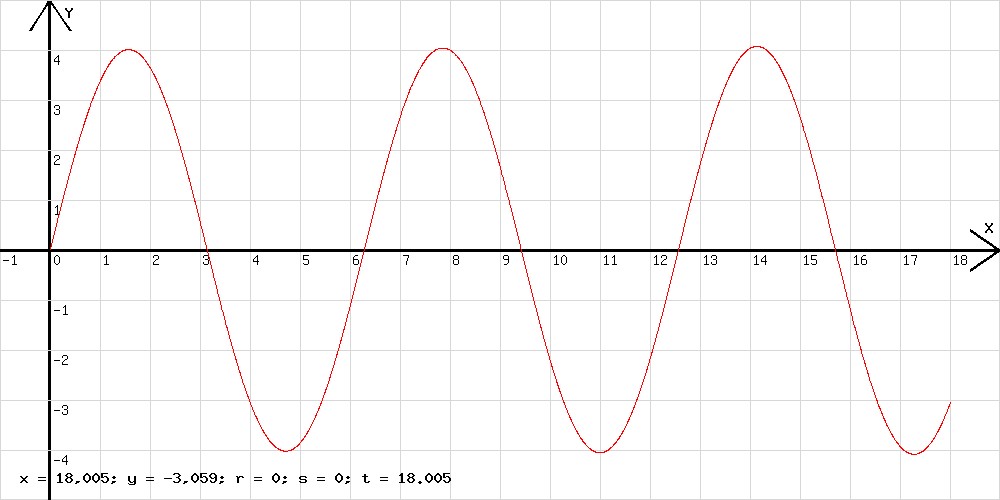
Abb.1 (links-unten werden die Endwerte von x, y und i eingetragen.)
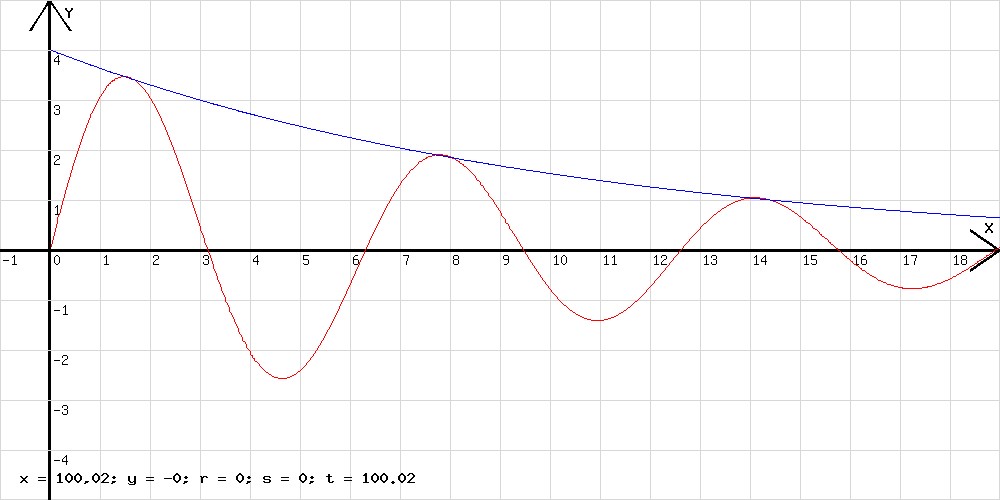
Abb.2
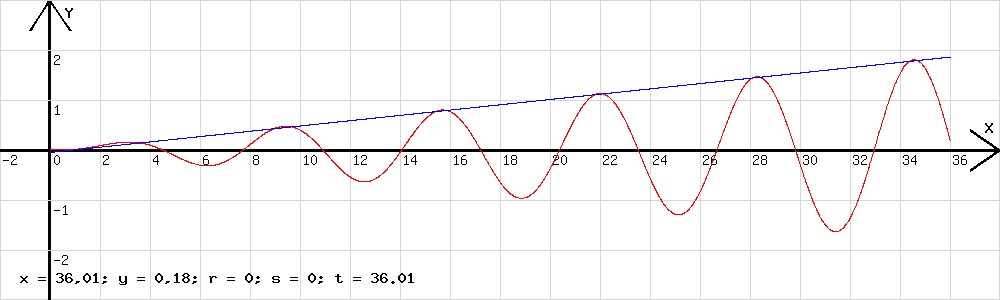
Abb.3
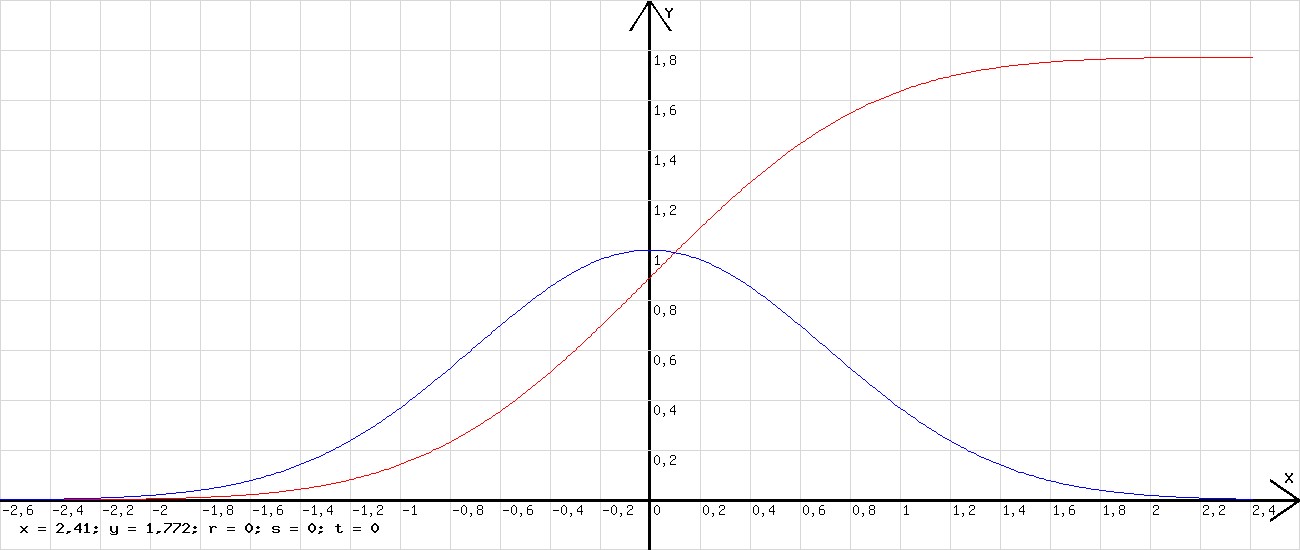
Abb.4
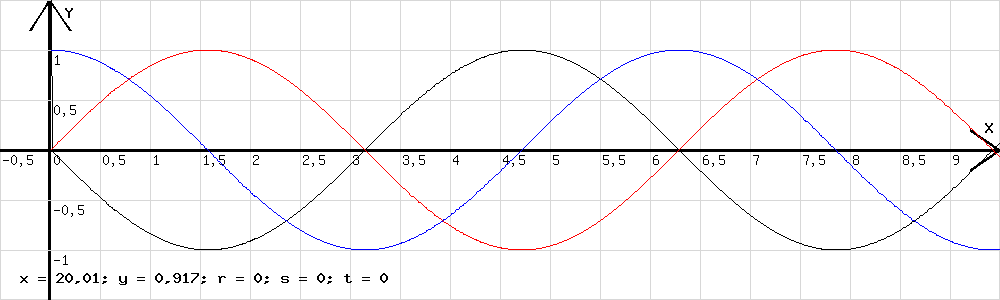
Abb.5
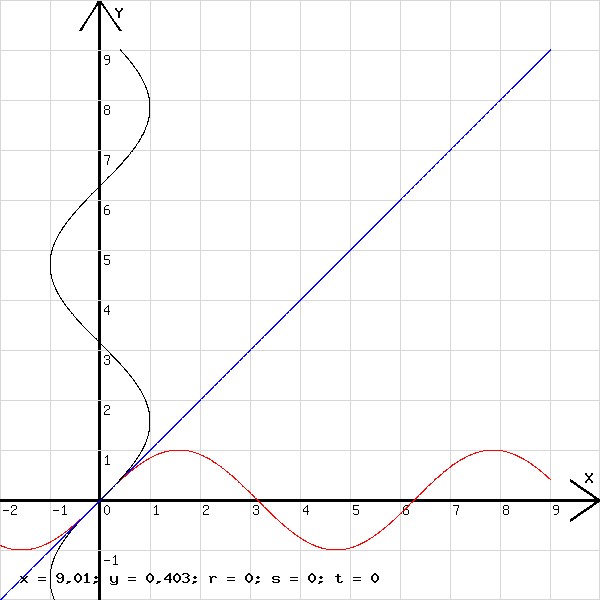
Abb.6
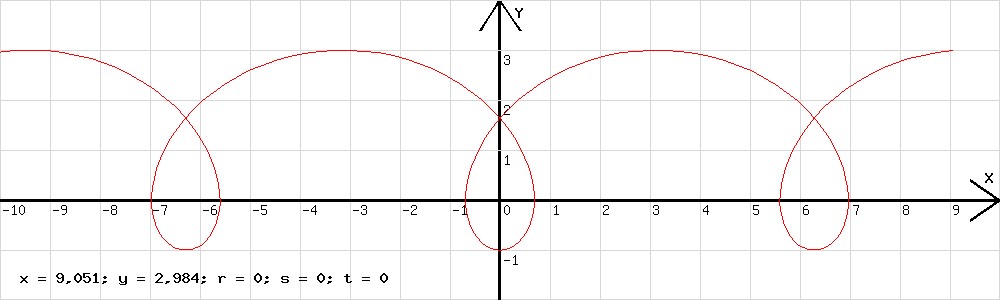
Abb.7
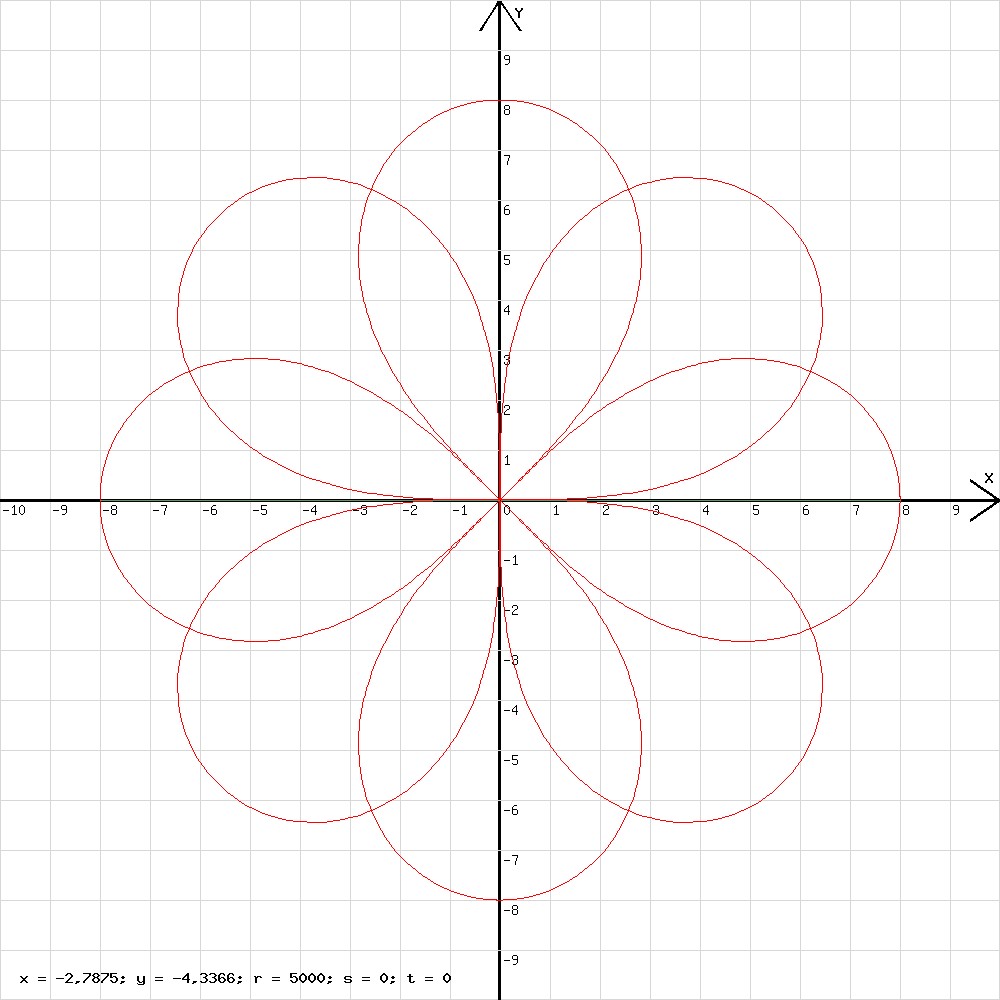
Abb.8
Weitere Anwendungsbeispiele
|