|
Abb. 1 |
Abb.2 |
Bau und Anwendung einer Schaltung zur Messung elektrischer Ladungen
Eine Schaltung, mit der in Verbindung mit einem AD-Wandler (CASSY oder Arduino) sehr kleine elektrischer Ladungen gemessen werden können, ermöglicht Experimente im Physikunterricht, die von Schülern als sehr interessant wahrgenommen werden. Ein sehr präzise arbeitende als Schaltung , Integrator genannt, kann von einem Schüler im Rahmen einer Facharbeit gebaut werden. In diesem Artikel wird eine Bauanleitung dazu gegeben. Bevor dies geschieht, werden einige interessante Unterrichtsexperimente mit einem Integrator vorgestellt.
Anwendung einer Schaltung zur Messung elektrischer Ladungen
Versuch 1
Experiment zum Freien Fall
In ein eisernes Regenabflussrohr, welches über einen Integrator geerdet ist, fällt ein Plastikrohr, welches durch Reiben mit einem Stück Papier elektrostatisch aufgeladen wurde (siehe Abb. 1).
|
Abb. 1 |
Abb.2 |
Während des Falls verdrängt das negativ aufgeladene Plastikrohr eine dem Fallweg proportionale elektrische Ladung aus dem Regenabflussrohr zum Integrator. Der an den Integrator angeschlossene AD-Wandler (Arduino) vermittelt die in engem zeitlichem Abstand gemessenen Ladungswerte einem Computer, der dazu ein Weg-Zeit-Diagramm (siehe Abb. 2) zum freien Fall der Plastikröhre zeichnet. Anhand des parabelförmigen Diagramms kann die Fallbeschleunigung ziemlich genau ermittelt werden. Die 46 cm lange Fallstrecke beginnt im Blechrohr 30 cm unterhalb der oberen Rohröffnung und endet 27 cm vor dem unteren Ende des Rohrs. In diesem Fall wirkt sich das inhomogene elektrische Feld am Anfang des Stabes nicht in unerwünschter Weise auf den Verlauf des Diagramms aus.
Achtung: Der Integrator darf nicht direkt an das Regenabflussrohr angeschlossen angeschlossen werden. Es muss ein Kondensator dazwischen geschaltet werden, denn Reibungselektrizität kann hohe Spannungen bewirken, welche den Integrator schädigen.
Das in der Abb.2 aufgenommene Diagramm wurde mit dem zu Arduino passenden Messprogramm CoolTerm aufgenommen. Das als Freeware erhältliche Coolterm (CoolTerm - Free download and software reviews - CNET Download ) ist erheblich leistungsfähiger als der zu Arduino gehörende serielle Plotter. Genauere Angaben zur Verwendung dieses Programms sind am Ende dieses Artikels.
Die mit CoolTerm aufgenimmenen Messdaten können mit "Programm zur grafischen Darstellung von Funktionen und zur Simulation von Bewegungen (g-hoehne.de)“ ausgewertet werden. Es handelt sich um ein mit php geschriebenes Onlineprogramm.
In der Abb. 3 ist ein Diagramm (violett) zu sehen, welches nach dem gerade erwähnten Onlineprogramm anhand der Messwerte von Abb.2 erzeugt wurde. Neben dem aus den Messwerten gebildeten Diagramm ist eine Parabel (rot) zur Funktion y=5E-6*x^2 (Zeit x in Millisekunden !), welche dem Diagramm der Messwerte angepasst wurde.
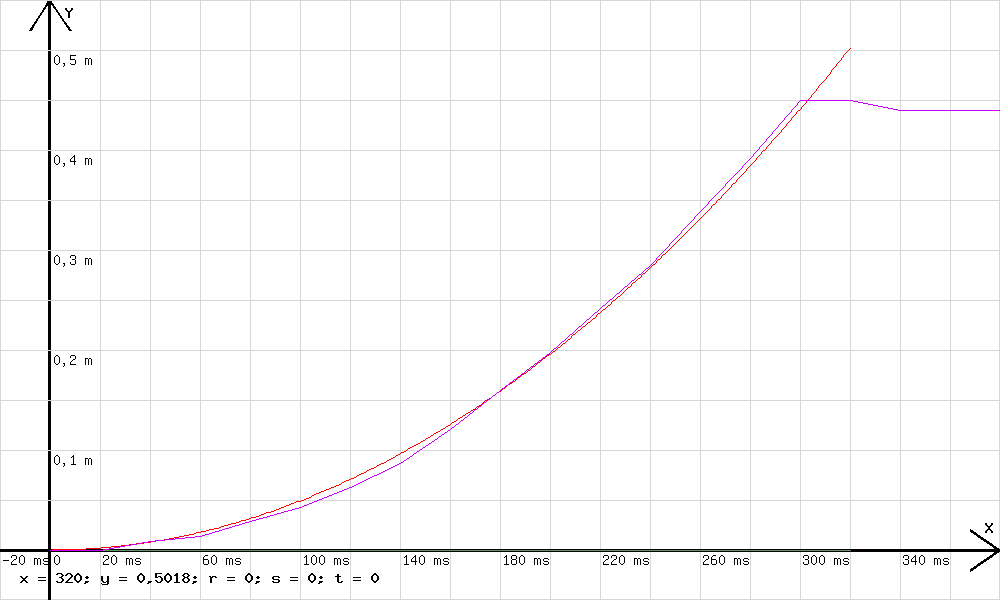
Abb.3
Versuch2
Elektrische Aufladung eines Schuhs beim Gehen
Wenn eine Person den Stecker in der Hand nimmt, der zuvor an das Regenrohr angeschlossen war, und damit geht, dann zeichnet der Computer das Diagramm in der Abb. 4.
Jeder Schritt wird angezeigt.

Abb.4
Dieses Diagramm weist auf Folgendes hin:
Wenn die Person einen Schuh auf den Boden setzt, dann bildet sich am Schuh eine an den Boden grenzende dünne negativ geladenen Schicht aus. Da die negative Ladung vom Boden aufgenommen wird, entsteht unter dem Schuh eine positiv geladene Grenzschicht auf dem Boden. Wird der Fuß vom Boden abgehoben, dann entwickelt sich eine Spannung zwischen dem Körper und dem Boden, unter der die negative Ladung des Schuhs zur Erde abgeführt wird.
Das Diagramm in der Abb. 5 wurde aufgenommen, als eine Person aus der Kniebeuge nach oben hüpfte. Es ist zu sehen, dass sie ca. 230 ms = 0,23 s ohne Berührung mit dem Boden war. Sie ist demnach 0,115 Sekunden gefallen. Nach s=g/2 ·t2 hat sie sich demnach um 6,6 cm vom Boden entfernt. Sie löste sich mit der Geschwindigkeit v = g · 0,115 s = 1,15 m/s vom Boden. Als Zeit der Abstoßung kann man 0,2s ablesen. Die mittlere Beschleunigung der Körperschwerpunkts aus der Kniebeuge heraus ist demnach 1,15/0,2 = 5,7 m/s2 . Sie hat sich demnach schätzungsweise mit dem 1,57 fachen ihrer Gewichtskraft vom Boden abgestoßen.
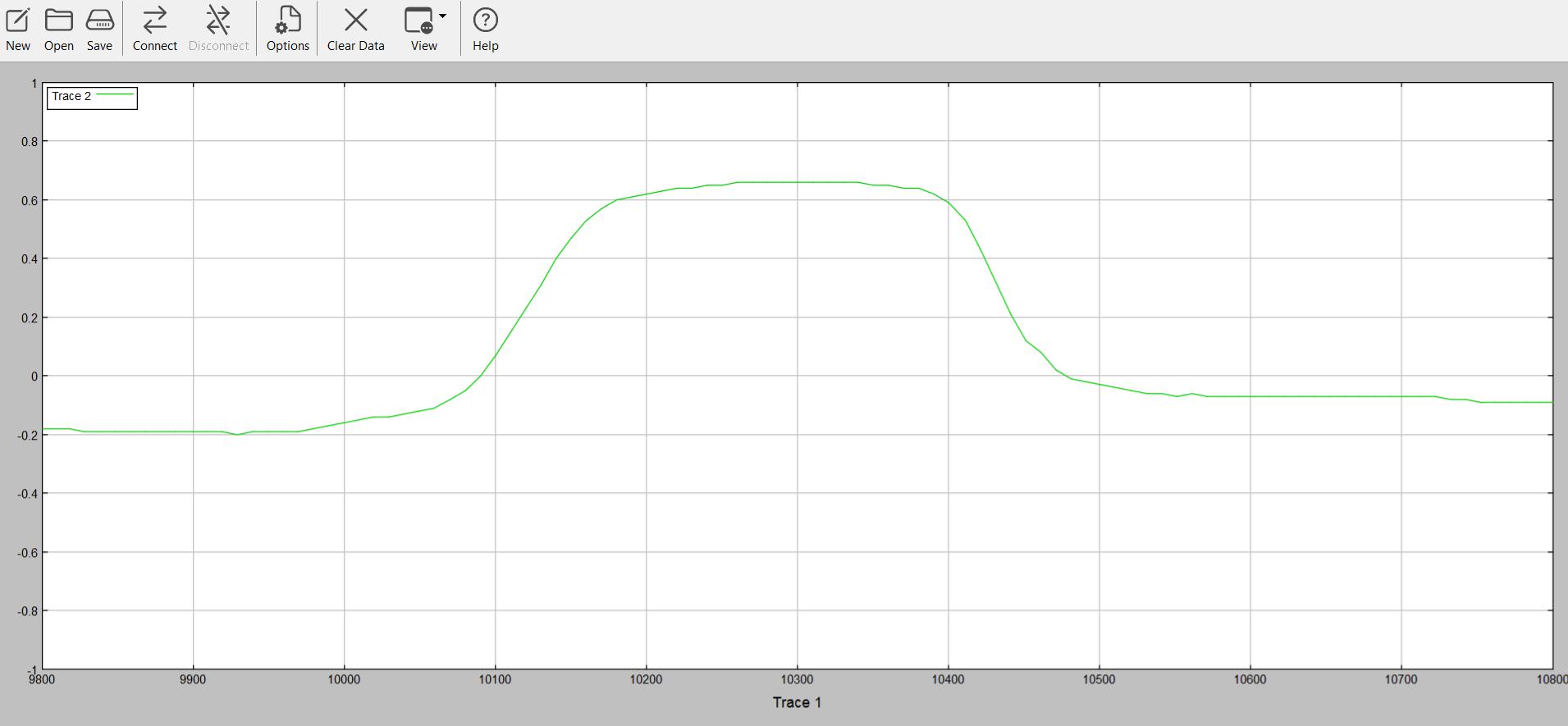 Abb.
5
Abb.
5
Versuch3
Untersuchung zur Harmonischen Schwingung
In der Abb. 6 ist das nächste Experiment dargestellt. Ein Gegenstand schwingt an einer Schraubenfeder auf und ab. An ihm hängt ein kleiner Stabmagnet, der in eine Spule aus gelacktem Kupferdraht eintaucht. Er induziert eine elektrische Spannung in die Spule, unter der Ladungsverschiebungen stattfinden, die den entsprechenden Verschiebungen des Magneten proportional sind. Ein Schwingungsdiagramm wird gezeichnet (siehe Abb.7). Es ist erkennbar, dass es mit dem seriellen Plotter von Arduino aufgenommen wurde. Die Spule bildet mit dem Magneten einen sehr empfindlichen Längensensor. Die Abb. 8 wurde mit dem erwähnten Onlineprogramm erzeugt. Sie zeigt das Schwingungsdiagramm zusammen mit dem Graphen einer Sinusfunktion.
|
|
|
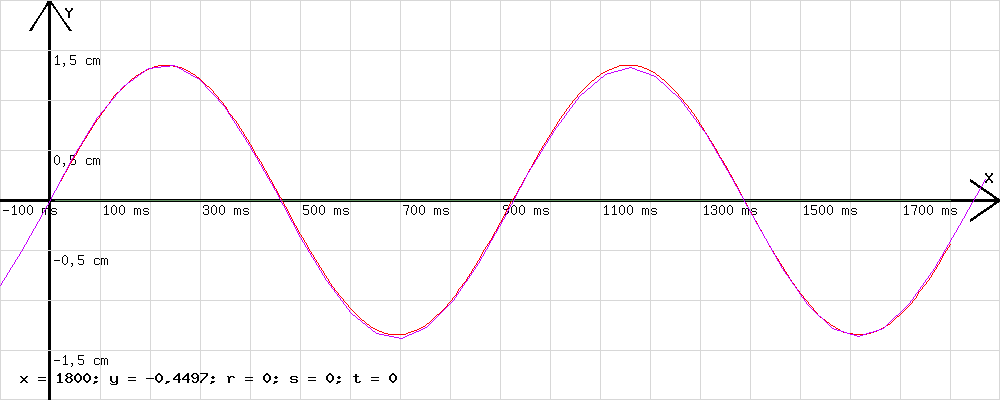
Abb. 8
Versuch 4
Messung der Kraft, mit der sich eine Person aufrichtet und hochhüpft
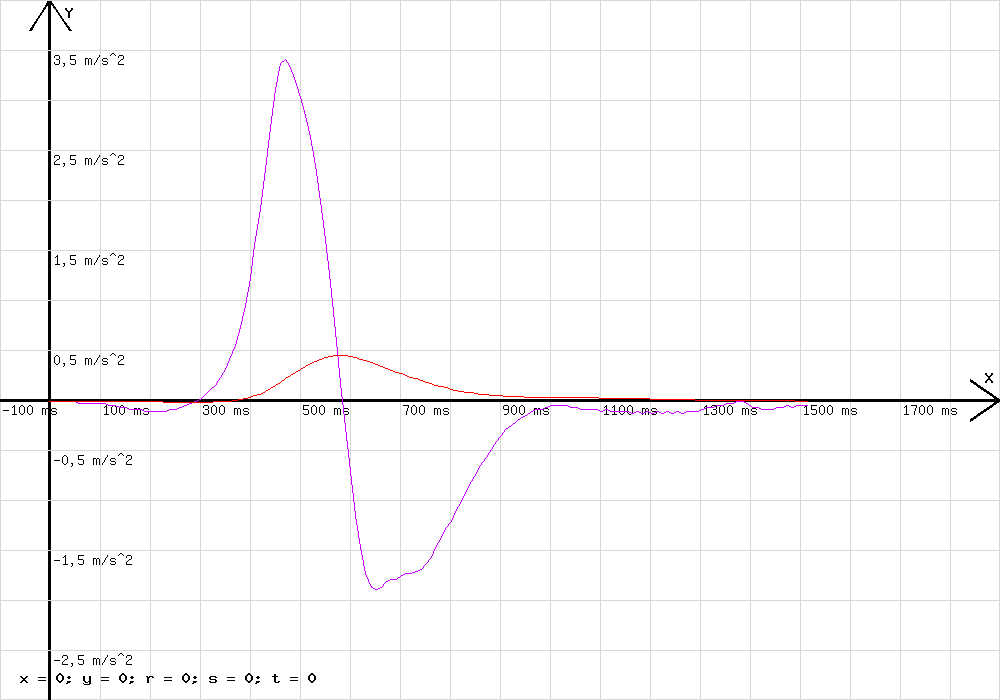
In Abb. 9 ist eine Person zu sehen, die auf einem 3 cm dicken Brett aus der Kniebeuge in den Stand geht. An der Unterseite des Bretts ist ein Stabmagnet befestigt, der in eine darunter stehende Spule taucht. Die Eintauchtiefe des Magneten hängt von der Belastung des Bretts ab. Eine Änderung der Belastung wird durch die Ladung angezeigt, die während dieser Änderung infolge der dabei auftretenden Induktionsspannung durch die Spule fließt. Mit einem CASSY wurde hierbei ein Diagramm aufgenommen, welches durch passende Kalibrierung zu einem a-t-Diagramm wurde. In der Abb.10 ist das zur dargestellten Bewegung gehörende Beschleunigungsdiagramm mit einem daraus durch Integration gewonnenen v-t-Diagramm zu sehen.
Abb. 11 sind zwei Diagramme zu sehen, die während des Absprungs einer Person vom Sprungbrett mit Arduino aufgenommen wurden. Das grüne Diagramm zeigt m·a an, die zur Beschleunigung nach oben aufgewandte Kraft. Das rote Diagramm beschreibt das Fünffache des Körperimpulses. Nach dem Absprung wird das Brett um die Gewichtskraft des Körpers entlastet, wobei sich die Kraft F des Bretts um -m·g = -880N ändert . Das Diagramm läuft kurzzeitig unter -880 N. Dieser Verlauf ist auf ein Abfederrn des Brett vom Boden nach dem Absprung zurückzuführen.
Wichtiger Hinweis: Der Kondensator des Integrators wurde entladen, nachdem die Person das Brett bestiegen hatte. Infolgedessen wurde nicht die vom Brett ausgehende Kraft F, sondern F - m·g = m·a gemessen .
|
Abb.9 |
Abb. 10 |
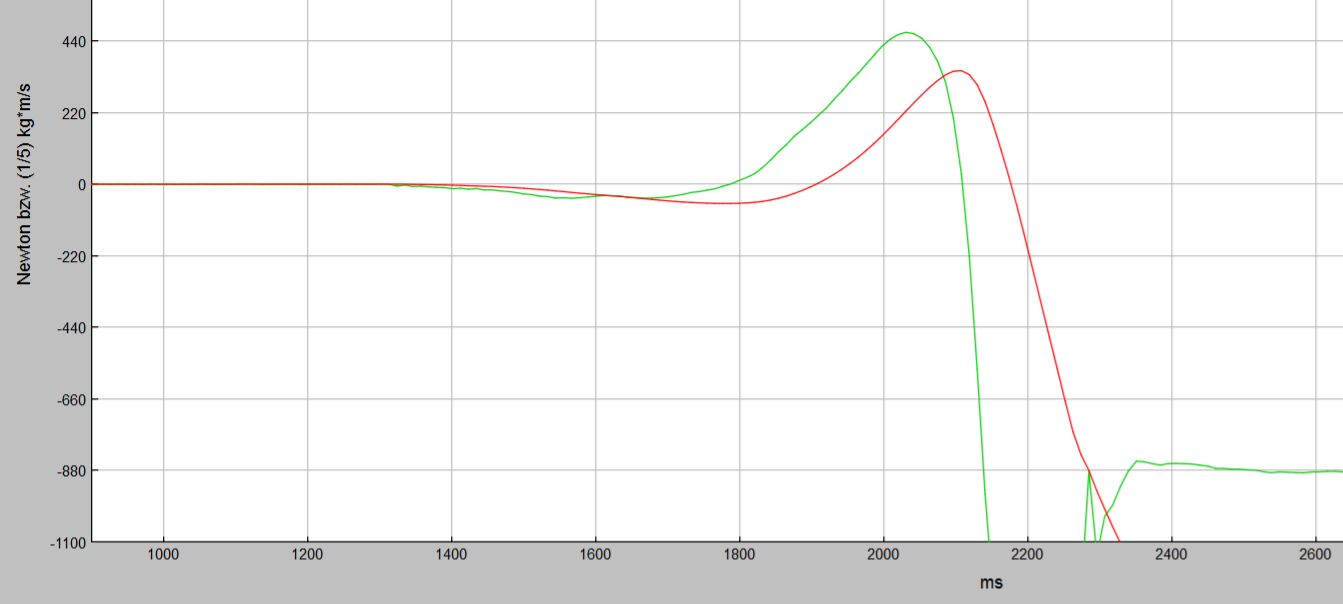
Abb.11
Versuch 5
Experiment zur Exponentialfunktion
Auf das Brett fällt ein Ball . Er springt nach dem Aufschlag wieder hoch, fällt wieder auf das Brett usw. Hierbei wird das in der Abb.12 sichtbare Diagramm gezeichnet, an dem die Zeitpunkte der Aufschläge deutlich erkennbar sind. Mit der Zeit tx zwischen dem x. und dem (x+1). Aufschlag kann die Sprunghöhe sx nach dem x. Aufschlag berechnet werden ( sx = (g/2) ·(tx/2)2 ). Die zu x = 0, 1, 2 ... gehörenden Sprunghöhen sind in der Abb.13 als Punkte eines Streckenzugs dargestellt. Diese Punkte liegen auf dem Graf zu f(x) = 46 cm · e –0,33 ·x (siehe Abb.14). Der Sprunghöhe nach dem ersten Aufschlag ist x = 0 zugeordnet.
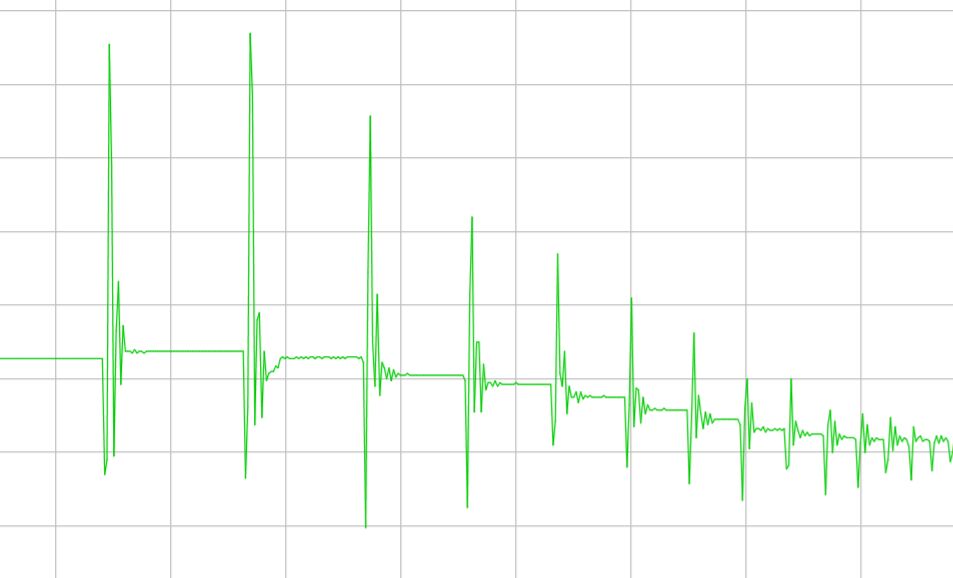
Abb.12
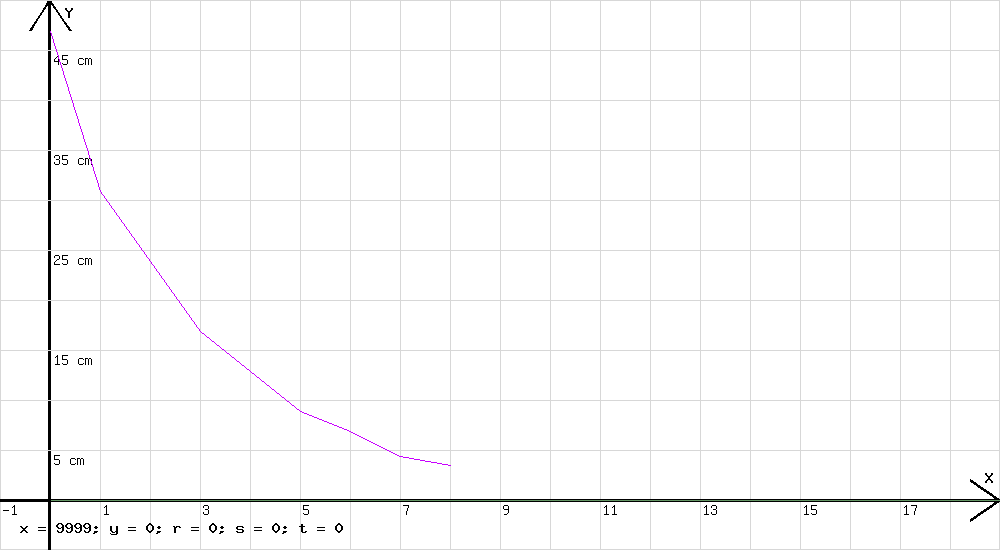
Abb.13
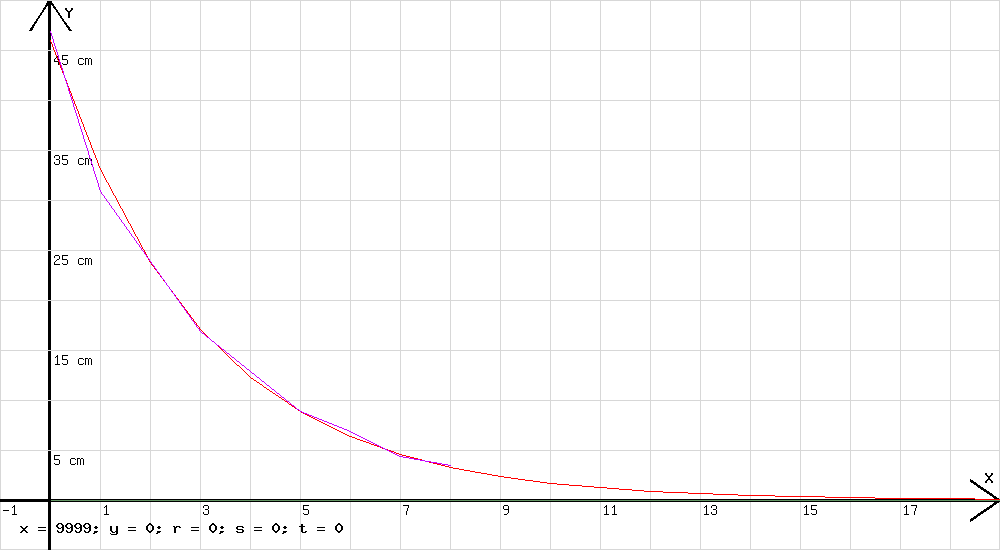
Abb.14
Versuch 6
Demonstration zum Schwerpunktsatz.
Eine Person liegt auf einem Brett, welches auf Wasserrohren aus Hartplastik gelagert ist (siehe Abb.15). Es handelt sich um orangefarbene Rohrstücke, welche in der Erde verlegt werden. Wenn Blut aus einer Herzkammer gepumpt wird, dann bewegt sich der Körper mit dem Brett zur Erhaltung des Schwerpunkts entgegen der Strömungsrichtung. Diese Bewegung wird von einem Rechner in einem Ballistokardiogramm (siehe Abb. 16) dargestellt. Zur Registrierung der Verschiebung ist am einen Ende des Bretts ein Magnet befestigt, der in eine Spule mit ca. 4000 Windungen hineinragt.

Abb.15
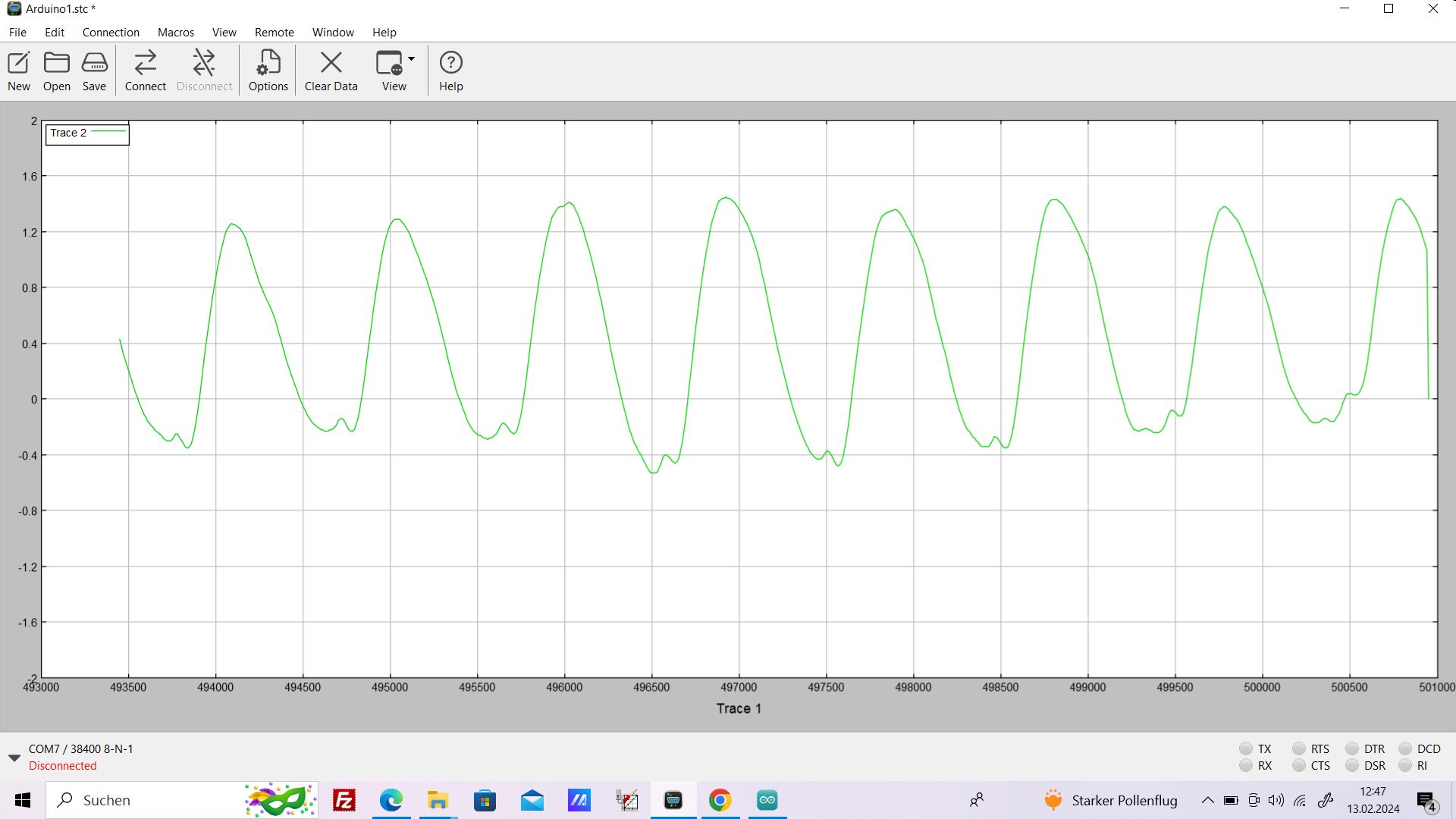 Abb.
16
Abb.
16
Anmerkung: Die Zahlen an der Längsachse stehen für die Millisekunden, die seit Beginn der Messung vergangen sind. Es ist erkennbar, dass das Herz der auf dem Brett liegenden Person in einer Minute 66 mal schlägt.
Es handelt sich bei diesem Versuch um eine Demonstration zum Schwerpunktsatz. Zur Einführung dieses Satzes wurde die Experimentierwippe entwickelt. Mit ihr kann auf leicht verständliche Weise der Schwerpunkt- und Impulssatz zu Beginn des Mechanikunterrichts eingeführt werden. Wenn der Kraftbegriff behandelt wird, muss der Impulssatz bekannt sein, da die Definition dieser Größe nach F=d(m·v)/dt erst im Rückblick auf dieses Gesetz sinnvoll erscheint. Nur mit dem Impulssatz kann überzeugend dargelegt werden, dass Δ(m·v) ein passendes Maß für eine äußere Einwirkung ist, außerdem spricht für die hier gewünschte Stellung des Impulssatzes die Tatsache, dass nach Einführung des Kraftmaßes mit ihm sowohl das Wechselwirkungsgesetz wie das Additionsgesetz der Kräfte deduktiv hergeleitet werden können. Die vorgeschlagene Folge entspricht dem axiomatischen Aufbau Newtons. Nach Arnold Sommerfeld (siehe „Theoretische Mechanik“ von Sommerfeld) ist Lex prima unter Berücksichtigung der ihm vorangestellten Definitionen über die Größe der Bewegung als Impulssatz aufzufassen.
Versuch 7
Experimentelle Einführung des Schwerpunkt- und Impulssatzes mit der Experimentierwippe
Eine gerahmte Glasplatte ist in ihrer Mitte (siehe Abb. 17) mit zwei dünnen Eisenbändern an einem Aluminiumrahmen befestigt. Die Eisenbänder lassen eine Drehung der Platte um deren Mitte gegen den Widerstand einer Blattfeder (Rückstellfeder) am linken Rand der Wippe zu (siehe Abb. 18). Eine geringe Drehung erfährt die Platte z.B. dann, wenn eine Kugel oder ein Experimentierwagen über sie rollt (siehe Abb.19). Die der Verschiebung der Experimentierobjekts proportionale Drehung ist bei einer Masse m des Objekts < 0,15 kg geringer als 0,1° und hat somit keinen merkbaren Einfluss auf die Bewegung.
Die Eigenschwingung der Platte (10 Schwingungen/Sekunde) kann mit Fett zwischen zwei Aluminiumplättchen am rechten Rand der Wippe gedämpft werden.
Zur Messung der Drehung ist am äußeren Rahmen, in einem Gehäuse verborgen, eine Spule mit vielen Windungen aus gelacktem Kupferdraht befestigt (siehe Abb. 17 und Abb. 19). In diese Spule ist ein sehr starker, kleiner Stabmagnet eingeführt, der an der beweglichen Wippe befestigt ist.

Abb.17
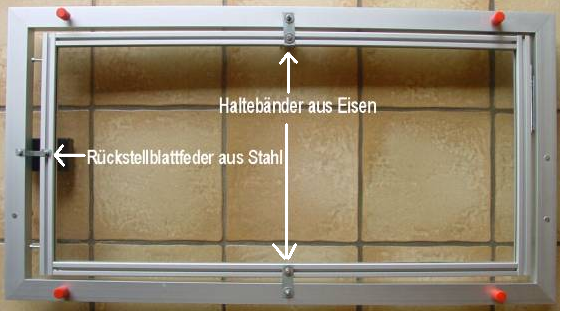
Abb.18
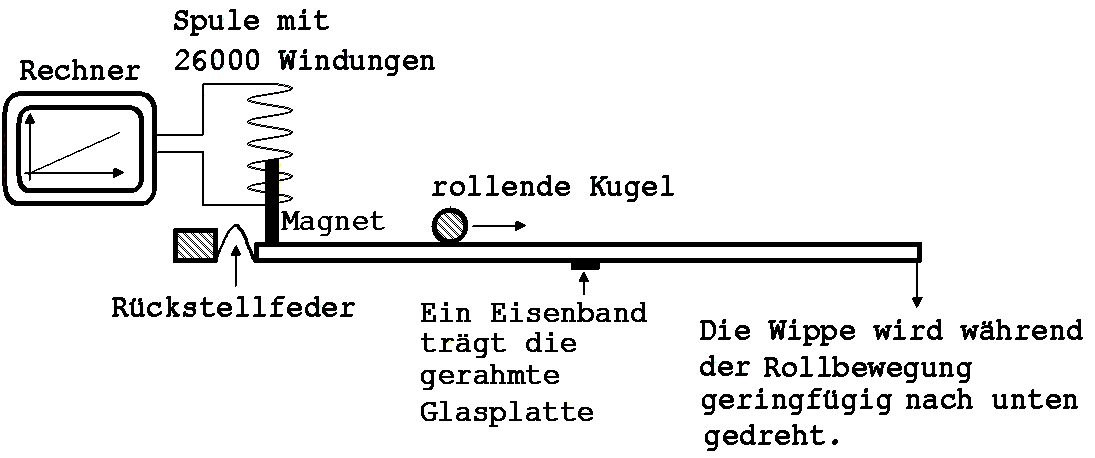
Abb.19
Wenn auf der waagrecht eingestellten Experimentierwippe eine rollende Glaskugel auf zwei andere ruhende Glaskugeln stößt, dann wird trotz des Stoßes vom Computer ein lineares Diagramm gezeichnet.
Schlußfolgerung:
Der Schwerpunkt eines abgeschlossenen Systems (System ohne Wechselwirkung mit seiner Umgebung) ist entweder in Ruhe oder er bewegt sich gleichförmig.
Aus diesem Satz kann unmittelbar der Impulssatz hergeleitet werden.
Versuch 8
Behandlung einer gleichförmig beschleunigten Bewegung mit einem Tachogenerator
Ein 60g-Gewicht spult einen Faden von einem Tachogenerator ab, der an über einen 150 kΩ-Widerstand mit dem Integrator verbunden ist (siehe Abb.20). Hierbei wird vom Rechner eine Parabel gezeichnet, an welcher abgelesen werden kann, dass das Gewicht mit 8m/s2 nach unten beschleunigt wird. Nimmt man statt dieses 60g-Gewichts ein 2kg-Gewicht, dann wird die Beschleunigung 9,7... m/s2 gemessen, da sich bei diesem Gewicht die hemmende Wirkung des Tachogenerators kaum auswirkt.

Abb.20
Hier ist anzumerken, dass für den Betrieb des Tachogenerators kein Integrator erforderlich ist. Die vom Tachogenerator gelieferten Spannungen sind so groß, dass auch gut nach dem folgenden für Arduino geschriebenen Programm numerisch integriert werden kann.
|
int eingang = A0; //Eingang A0 float ka= 47;//Kalibrierfaktor, Wege werden den Spannungen zugeordnet float it=0;// Integral long ni=0;//Zeit in Millisekunden long nii=0;//Zeit in Millisekunden long Wer = 0;//Spannung an A0, 10-bit-Wert 0-1024 long We = 0; //Spannung an A0, 10-bit-Wert 0-1024 float v = 10; //Mittelungszeit während der Messung //Die nächsten drei Zeilen sind für den Fall angelegt, dass die Spannung in Bezug auf eine //2,5V-Quelle (Mitte eines Potentiometers) gemessen werden soll. float n = 0; //n steht für den digitalen Wert von U0, wenn die Spannung zwischen A0 und dem //Mittelabgriff des Potentiometers 0 ist. float w = 50; //Mittelungszeit zur Bestimmung von n, dem digitale Wert von U0 float wi = 0; // Wert, der U - U0 entspricht int m = 0; // m steht für die Zahl der Messwerte, aus denen ein Mittelwert gebildet werden soll. long tt = 0; //Millis() long nil = 0; //mit Millis() long mil=0; void setup() { Serial.begin(38400); tt = millis(); do // Hier wird der zu U0 gehörende digitale Wert während „connect“ bei gedrückter //Entladetaste bestimmt. Betrifft Anwendung eines Integrators. { We= analogRead(eingang); Wer =Wer+We; ++m; nil = millis(); } while (nil - tt < w); n = Wer / m; ni=nil; }
//-------------------------------------- void loop() { m = 0; Wer = 0; We=0; wi = 0; mil=millis(); do //Mittelwertbildung aus m Messwerten { We = analogRead(eingang)-n; Wer=Wer+We; ++m; nil = millis(); } while (nil - mil < v); wi=Wer/m; wi = ka*wi * 5 / 1024; // Das linke wi steht für die Ausgangsspannung des Integrators. 5V entspricht 1024 ni=nil-tt; it=it+10*wi*(ni-nii)/1000;//Integral Serial.print(0.5*(ni+nii));// Zeit in Millisekunden Serial.print(","); Serial.print(wi);//1/10 der Geschwindigkeit Serial.print(","); Serial.println(it);//Integral nii=ni; } |
Das v-t-Diagramm (dm/s) sowie das s-t-Diagramm (cm) in der Abb.21 wurden mit diesem Programm während des in der Abb.20 dargestellten Versuchs aufgenommen. Dem Tachogenerator ist zur Glättung seines Ausgangssignals über ein RC-Glied (siehe Abb.22) an Arduino angeschlossen.
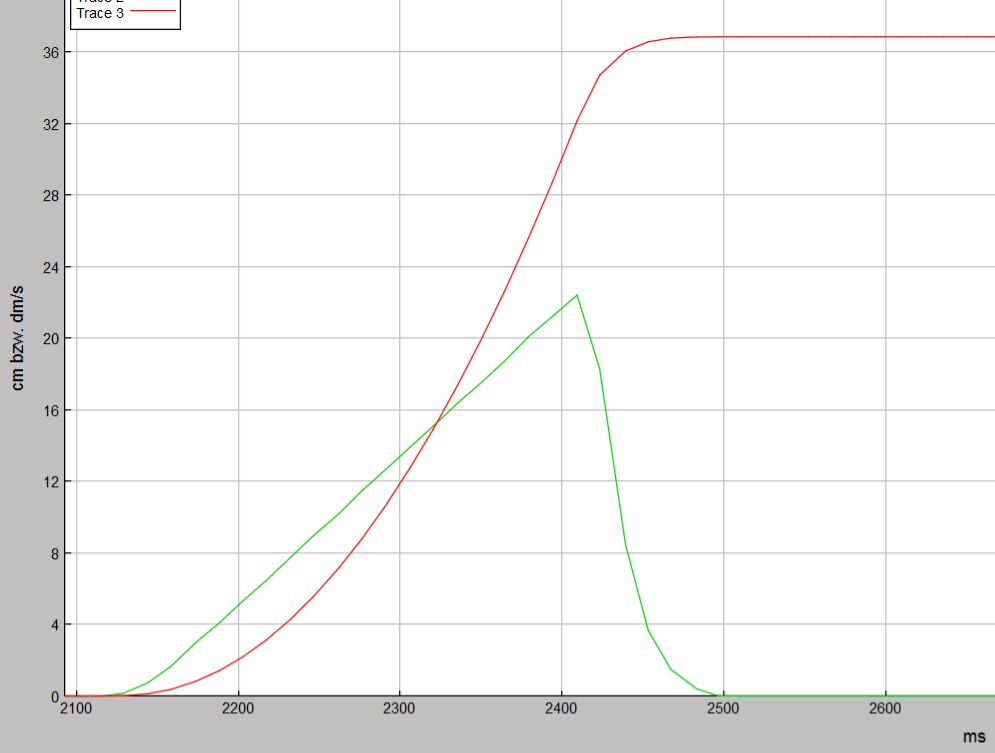
Abb.21
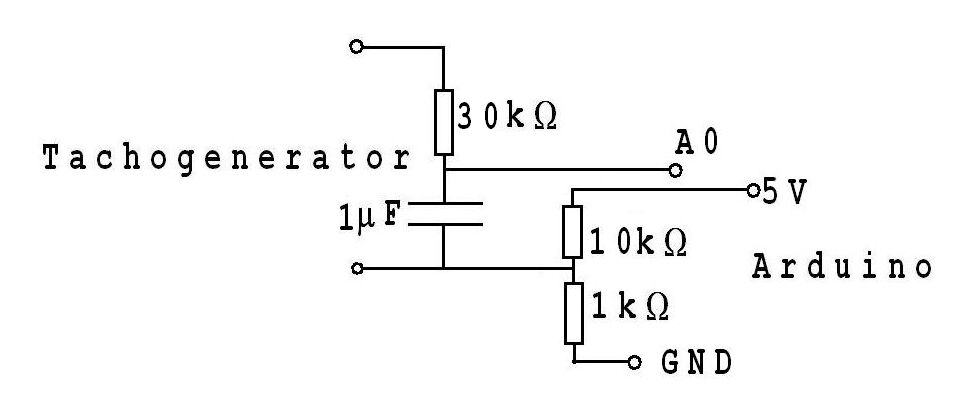
Abb.22
In der Abb.23 sind Diagramme zu sehen, die von dem schon mehrfach erwähnten Online- Grafikprogramm mit den in der Abb. 21 dargestellten Messergebnissen erzeugt wurden. Diese Diagramm wurde überzeichnet mit den Graphen zu y = 81,5*x/1000 und z=407*(x/1000)^2. Es ist zu beachten, dass die Geschwindigkeit in dm/s und der Weg in cm angegeben wird.
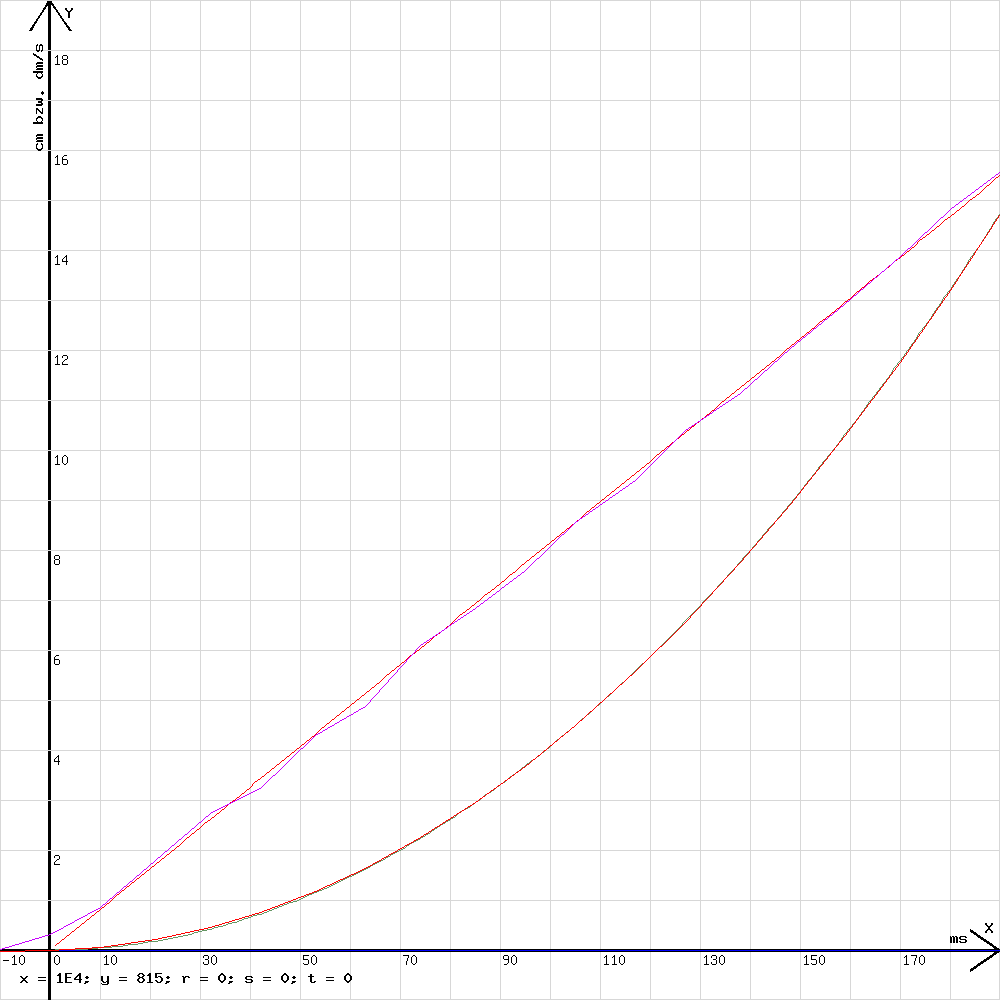
Abb.23
Der hier vorgestellte Tachogenerator ist im Unterricht vielseitig verwendbar. So kann unter anderem nach Anlaufverhalten eines Sprinters untersucht werden. Dabei stellt sich heraus, dass man Läufer schon anhand der ersten Schritts hinsichtlich ihrer Erfolgschancen beurteilen kann.
Anmerkung zur Kalibrierung:
Zur Kalibrierung wird ein Faden um eine bestimmte Länge L von dem Tachogenerator abgezogen. Wird dabei für dass Integral der Wert a ausgegeben, dann wird im Programm für ka der Wert L/a eingetragen.
Achtung: Der Faden muss zügig abgezogen werden, denn sonst kann a zu klein ausfallen, weil sehr kleine Spannungen der Tachogenerators von Arduino nicht hinreichend genau erfasst werden.
Bau einer Schaltung zur Messung elektrischer Ladungen
Es wird gezeigt, wie man auf einer vom Verfasser entwickelte Platine (der Verfasser gibt sie zum Selbstkostenpreis ab) einen sehr präzise arbeitenden Integrator zur Ladungsmessung realisieren kann. Integrator heißt diese Schaltung zur Ladungsmessung aus folgendem Grund:
In ihr wird ein elektrischer Strom der Stärke I durch einen Leiter mit dem Widerstand R zu einem Kondensator geführt, der dabei nach dem Integral ∫ I dt = Q aufgeladen wird. Das Ausgangssignal des Integrators ist die der Ladung Q proportionale Spannung am Kondensator UK = Q/C (C: Kapazität). C und R sind in der hier beschriebenen Schaltung 1 μF und 10 kΩ. Es gilt: Q = ∫ I dt = 1/R·∫Udt. U ist die Spannung über dem Widerstand mit R =10 kΩ. Da der Operationsverstärker dafür sorgt, dass die dem elektrischen Strom entgegen wirkende Kondensatorspannung durch eine gleich große Gegenspannung kompensiert wird, ist U gleich der Eingangsspannung UE am Integrator. Der Name Integrator wird mit der Tatsache begründet, dass UK = 1/(R·C)·∫UEdt die Größe des Integrals ∫UEdt anzeigt.
Zwei Schaltungen werden vorgestellt. Die erste ist für eine zum CASSY der Firma Leybold passende Box und die zweite ist zum Anschluss an Arduino. Der duale Operationsverstärker LTC1051 wurde für diese Schaltung gewählt, weil er im Vergleich mit anderen Operationsverstärkern wegen eines sehr geringen Temperaturdrifts sehr positiv auffällt. Übliche Temperaturschwankungen in einem Klassenzimmer wirken sich nicht merkbar auf sein Ausgangssignal aus. Von Amazon erhält man eine Packung mit 5 LTC1051 für 25€. Bei Conrad-Electronic oder Reichelt-Electronic kostet ein Exemplar ca. 10 €.
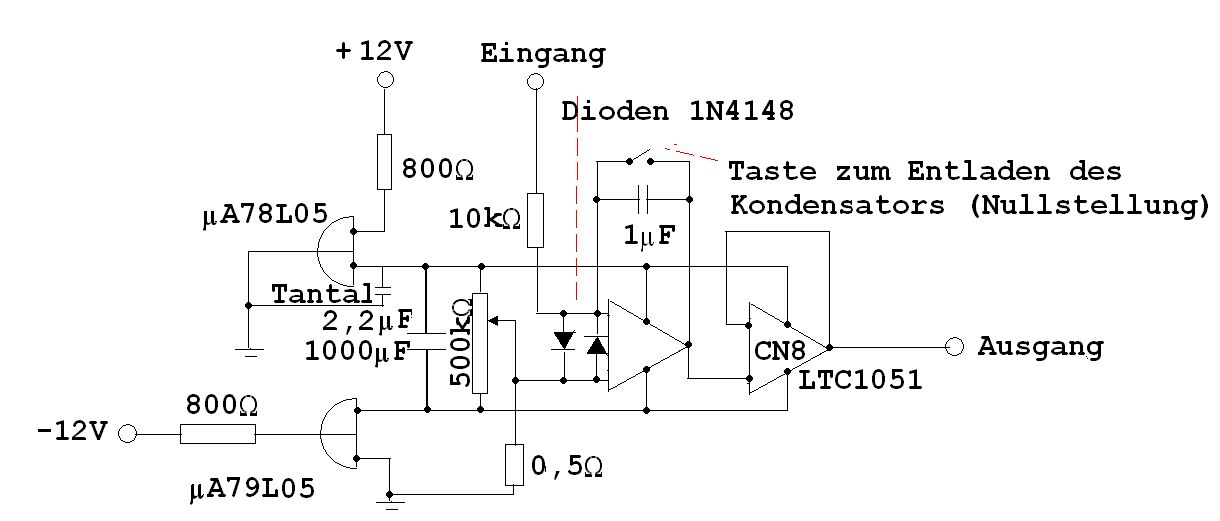
1. Schaltung für eine zum CASSY der Firma Leybold passende Nanocoulombbox
|
Abb. 25 |
Abb. 24 Coulombmeterbox zum CASSY |
Das CASSY liefert in Bezug auf die Erde die Spannungen -12 und +12 V. Mit den Spannungsteilern μA78L05 und μA79L05 werden daraus die zum Operationsverstärker passenden Spannungen – 5 V und + 5V erzeugt. Der 1000 μF Kondensator und der Tantalkondensator dienen der Stabilisierung der daraus resultierenden 10V-Spannung. Die 800Ω-Widerstände vor den Spannungsteilern sollen im Falle eines Kurzschlusses innerhalb der Schaltung sowohl das CASSY als auch die Spannungsteiler vor Überlastung schützen. Mit dem 500 kΩ-Spindelpotentiometer wird in Verbindung mit dem 0,5Ω-Widerstand die sehr kleine Offsetspannung der Operationsverstärkers kompensiert. Das Spindelpotentiometer wird so eingestellt, dass bei der Eingangspannung 0 die Spannung zwischen outA und -inA ebenfalls 0 ist. Die beiden Dioden 1N4148 sollen den Operationsverstärker vor hohen Spannungen schützen, die bei Induktionsversuchen möglich sind. In der Abb.26 ist zu sehen, wie diese Schaltung auf der für das CASSY vorgesehenen Platine verwirklicht werden kann.
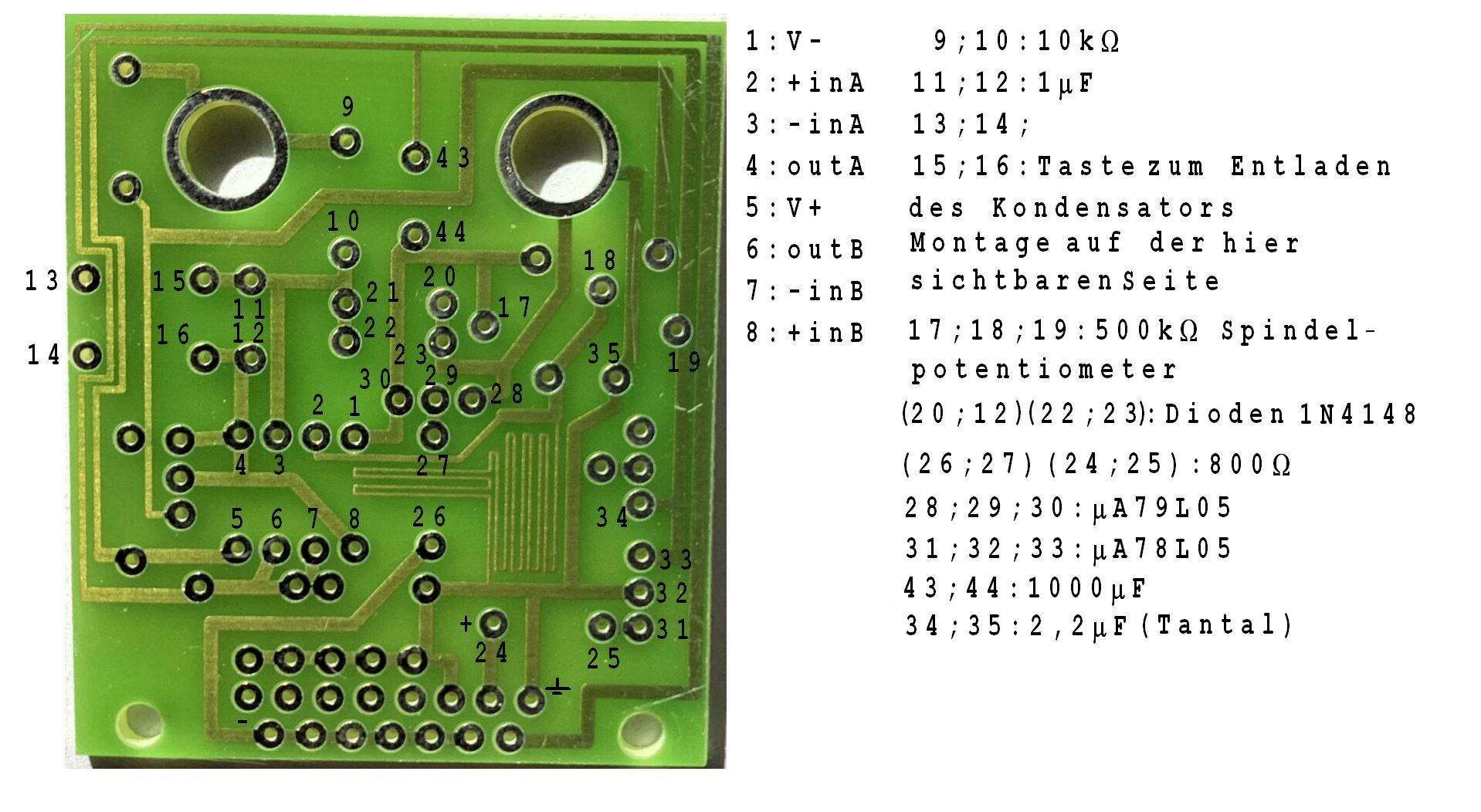
Abb. 26
Der 0,5Ω-Widerstand ist auf der Platine als lange , dünne, hin und zurück laufende Leiterbahn zu sehen. Mit den Leiterringen um die kreisförmigen Öffnungen wird eine elektrische Verbindung zu zwei Bananensteckerbuchsen für die Eingangsspannung hergestellt. Zur Realisierung eines guten Kontaktes müssen diese Ringe mit Lötzinn überzogen werden. Die Platine wird an den genannten Buchsen festgeschraubt. Zum Anschluss an das CASSY wird ein gewinkelter Stecker (Typ D-SUB ST 15 EU) an die Platine gelötet. Der Operationsverstärker sollte nicht angelötet, sondern auf einen dazu passenden Sockel (GS8) gesteckt werden.
2. Zum Arduino Uno passende Schaltung
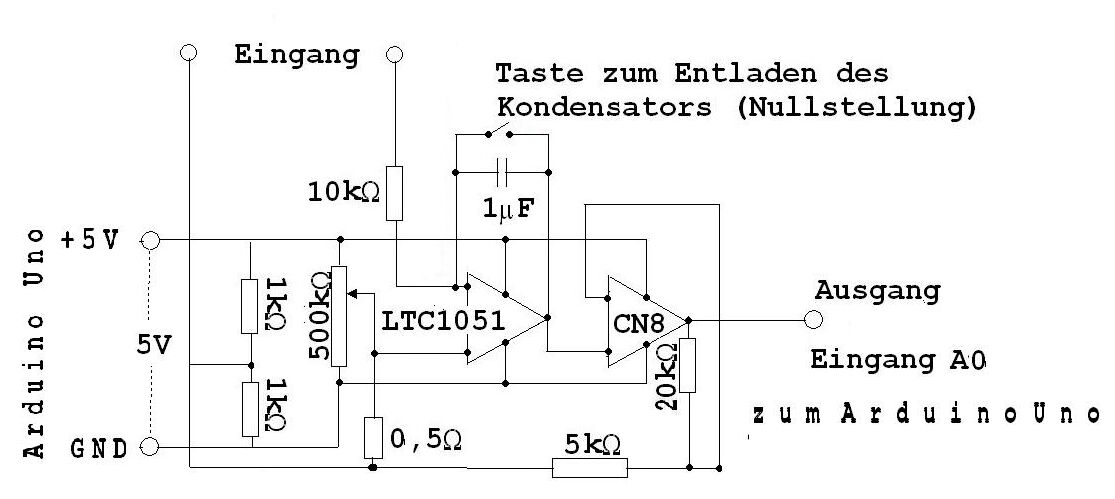
Abb.27
Mit dem zweiten Verstärker des dualen Operationsverstärkers LTC1051 wird die Kondensatorspannung um den Faktor 5 verstärkt. Die Spannung zwischen der Mitte M des aus zwei 1 kΩ -Widerständen gebildeten Spannungsteilers und dem freien Ende des 10 kΩ-Widerstandes ist die Eingangsspannung UE . Arduino zeigt die Spannung an A0 in Bezug auf GND an. Es sind Spannungen U zwischen 0 und 5 V . Ist UE gleich 0, dann ist U = U0 ≈ 2,5 V . Damit Spannungen in Bezug auf M angezeigt werden, wird im Messprogramm U0 von U abgezogen. Infolge der Verstärkung ist U - U0 fünfmal größer als die Spannung am 1μF-Kondensator. In der Abb.28 ist zu sehen, wie diese Schaltung auf der für das CASSY vorgesehenen Platine verwirklicht werden kann.
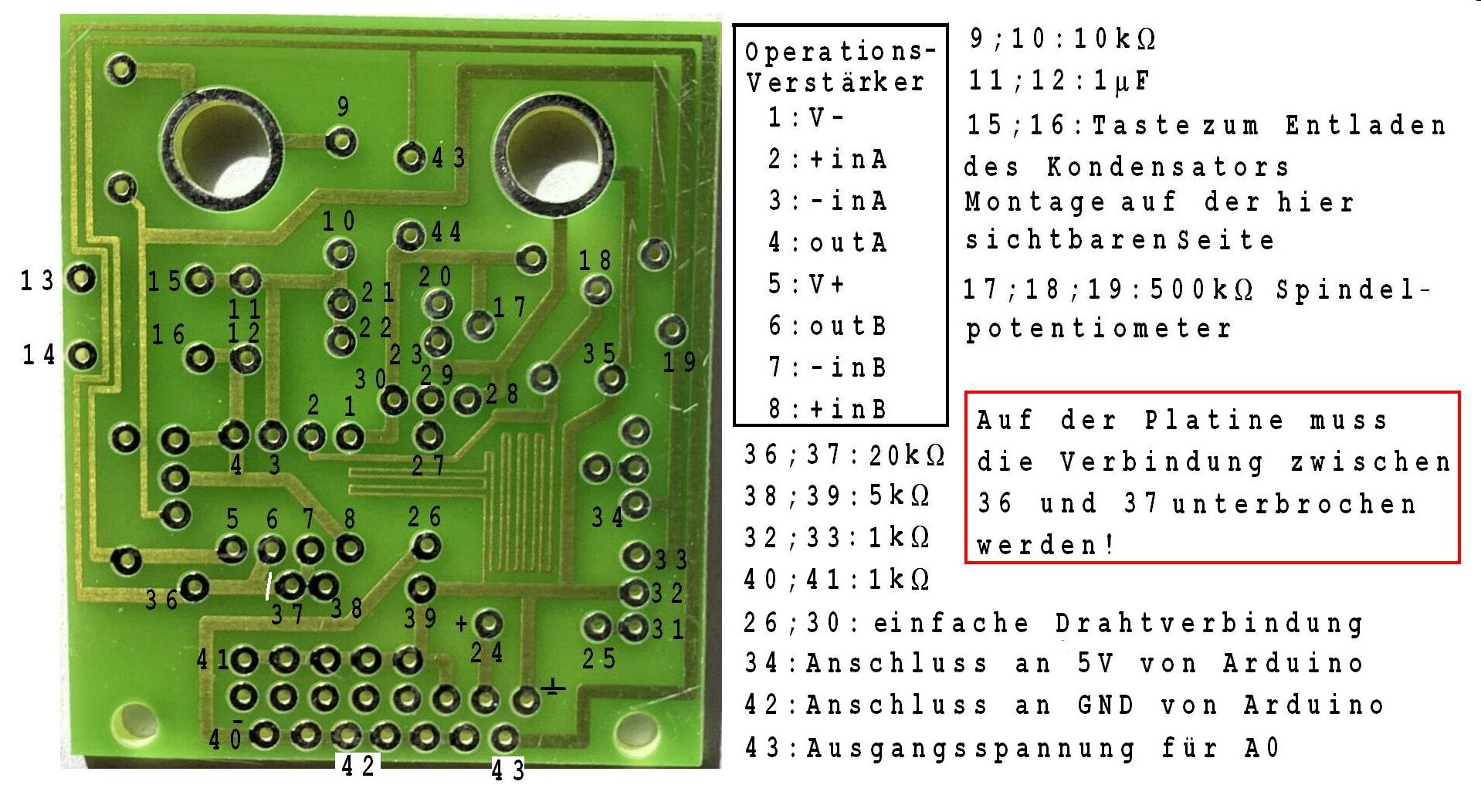
Abb.28
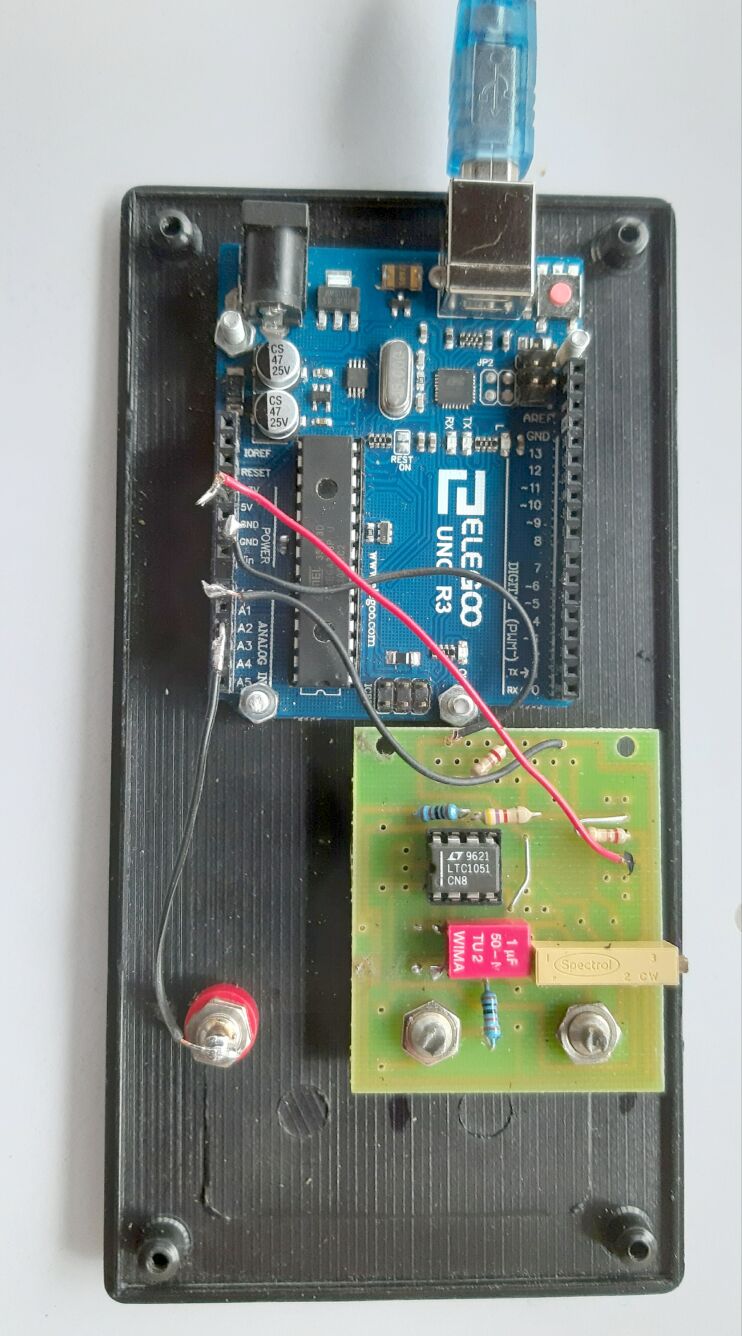
In den Abbildungen 29 und 30 ist eine Box dargestellt, die sowohl den Arduino Uno als auch den daran angeschlossenen Integrator zur Ladungsmessung enthält.
Der Integrator erhält seine Versorgungsspannung über die Anschlüsse GND und +5V auf dem Arduinoboard. Die Schwarze Buchse auf der Box (siehe Abb.30) ist an die Mitte eines Spannungsteilers aus zwei 1kΩ-Widerständen angeschlossen (siehe Abb.27). Die grüne Buchse ist über einen 10kΩ-Widerstand mit dem invertierenden Eingang (-inA) des Operationsverstärkers verbunden. Auf diese Weise ist der Integrator für Eingangsspannungen von -2,5 V bis +2,5V ausgelegt. Die Ausgangsleitung des Integrators ist an den Analogeingang A0 des Arduinoboards angeschlossen. Neben der grünen Buchse ist noch eine rote Buchse auf der Box (siehe Abb. 30) erkennbar. Diese ist an den Analogeingang A2 des Arduinoboards angeschlossen. Sie wurde angebracht, damit auch eine Spannung zwischen der schwarzen und der roten Buchse und nicht nur deren Integral gemessen werden kann. Vor den genannten Buchsen ist die Taste zum Entladen des Kondensators zu sehen.
|
Abb. 29 |
Abb.30 |
Messprogramm zum Arduino
|
int eingang = A0; //Eingang A0 float ka=1; //Kalibrierfaktor float it=0;// Integral long ni=0;//Zeit long nii=0;//Zeit float Wer = 0; //Spannung an A0, 10-bit-Wert 0-1024 float w = 100; //Mittelungszeit zur Bestimmung von n, dem digitale Wert von U0 float v = 60; //Mittelungszeit während der Messung float n = 0; //n steht für den digitalen Wert, wenn die Spannung zwischen A0 und dem Mittelabgriff des Potentiometers 0 ist. float wi = 0; // Wer – n entspricht U - U0 int m = 0; // m steht für die Zahl der Messwerte, aus denen ein Mittelwert gebildet werden soll. long tt = 0; //Millis() long nil = 0; //mit Millis() long mil=0; void setup() { Serial.begin(38400); tt = millis(); do // Hier wird der zu U0 gehörende digitale Wert während „connect“ bei gedrückter Entladetaste bestimmt. { Wer = analogRead(eingang) + Wer; ++m; nil = millis(); } while (nil - tt < w); n = Wer / m; } //-------------------------------------- void loop() { m = 0; Wer = 0; wi = 0; mil=millis(); do //Mittelwertbildung aus m Messwerten { Wer = analogRead(eingang); wi = Wer - n + wi; ++m; nil = millis(); } while (nil - mil < v); wi = ka*(wi / m) * 5 / 1024; // Das linke wi steht für die Ausgangsspannung des Integrators. 5V entspricht 1024 ni=nil-tt; it=it+5*wi*(ni-nii)/1000;//Integral, die Anzeige wird um den Faktor 5 vergrößert. Infolgedessen steht eine Einheit der Anzeige nur für 1/5 nii=ni;//neu Serial.print(0.5*(ni+nii)); Serial.print(","); Serial.print(wi); Serial.print(","); Serial.println(it);//Integral, die Anzeige durch das Messprogramm kann vermieden werden } |
Das Programm wird bei kurzgeschlossenem Eingang des Integrators und gedrückter Entladetaste auf den Arduino geladen.
Einstellungen im Programm Coolterm
Unter Options wird der Port und die Baudrate angegeben.
Nach einem Rechtsklick im Diagrammfeld wird Chart Properties angeklickt.
Unter Data Source wird Data Column 1 gewählt und unter y-Axis wird Fixed, Min -2, Max 2 angeklickt
Nach Connect muss Clear Data angeklickt werden !
Nachtrag:
Als Spindelpotentiomenter zum Ausgleich der Offsetspannung sind Potentiometer mit den Werten von 50 kΩ bis 500 kΩ geeignet. Vor dem Einbau sollte man darauf achten, dass die Widerstände zwischen dem Mittelabgriff und den beiden Enden übereinstimmen. Dies erleichtert den Abgleich.
Achtung: Wenn der Computer über seinen Netzstecker geerdet ist, dann darf bei Verwendung von Arduino keine einseitig geerdete Spannungsquelle angeschlossen werden, sie würde einen Widerstand des Spannungsteilers überbrücken.
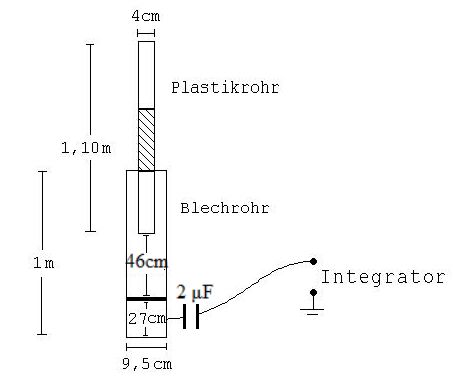
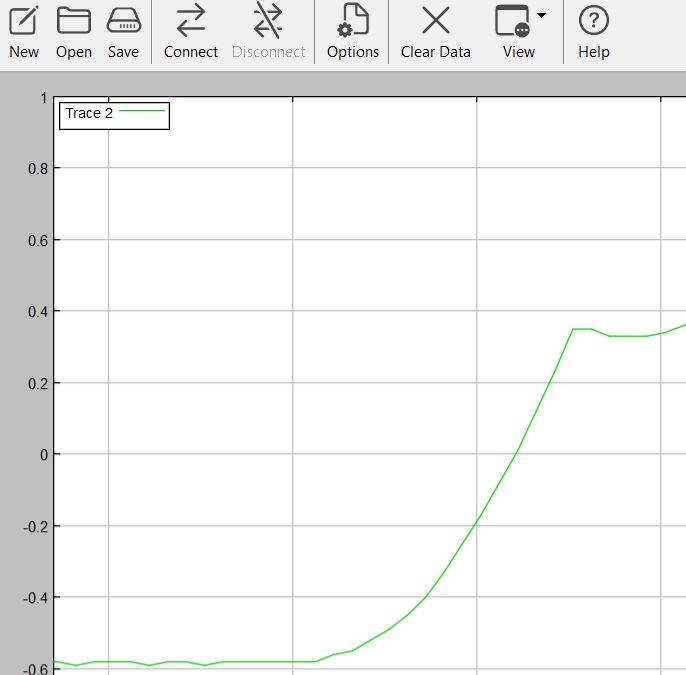

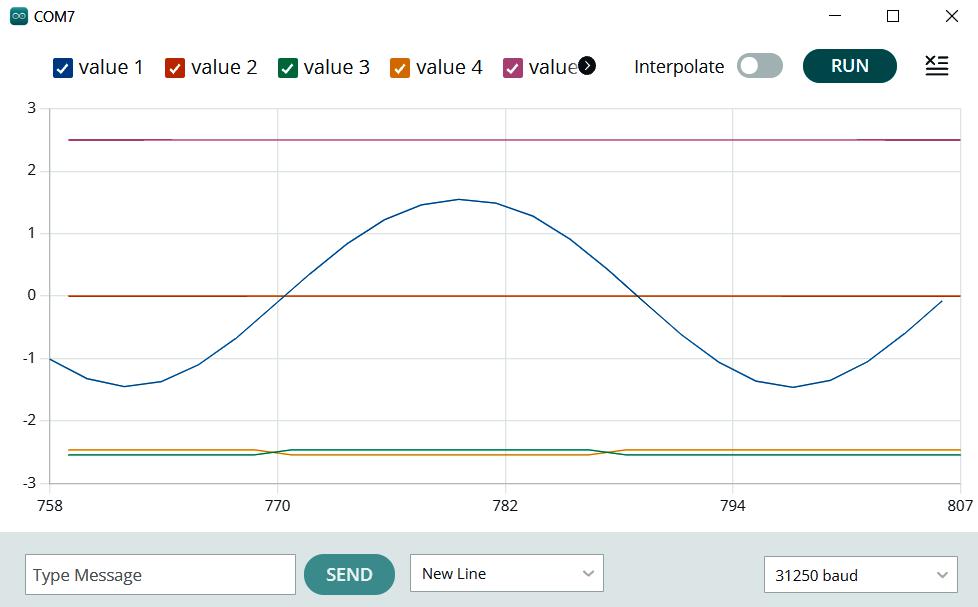 Abb.7
Abb.7